Building structured neural network models of the motor regions of the mammalian brain
While largely interconnected and integrated, the mammalian brain is composed of distinct anatomical regions that have different developmental programs and architectures. Notably, the neurons — the cells that compose each brain region — are organized according to unique connectivity patterns in these different brain regions. If one of these areas is damaged — for instance, because of trauma or stroke — this leads to specific deficits.
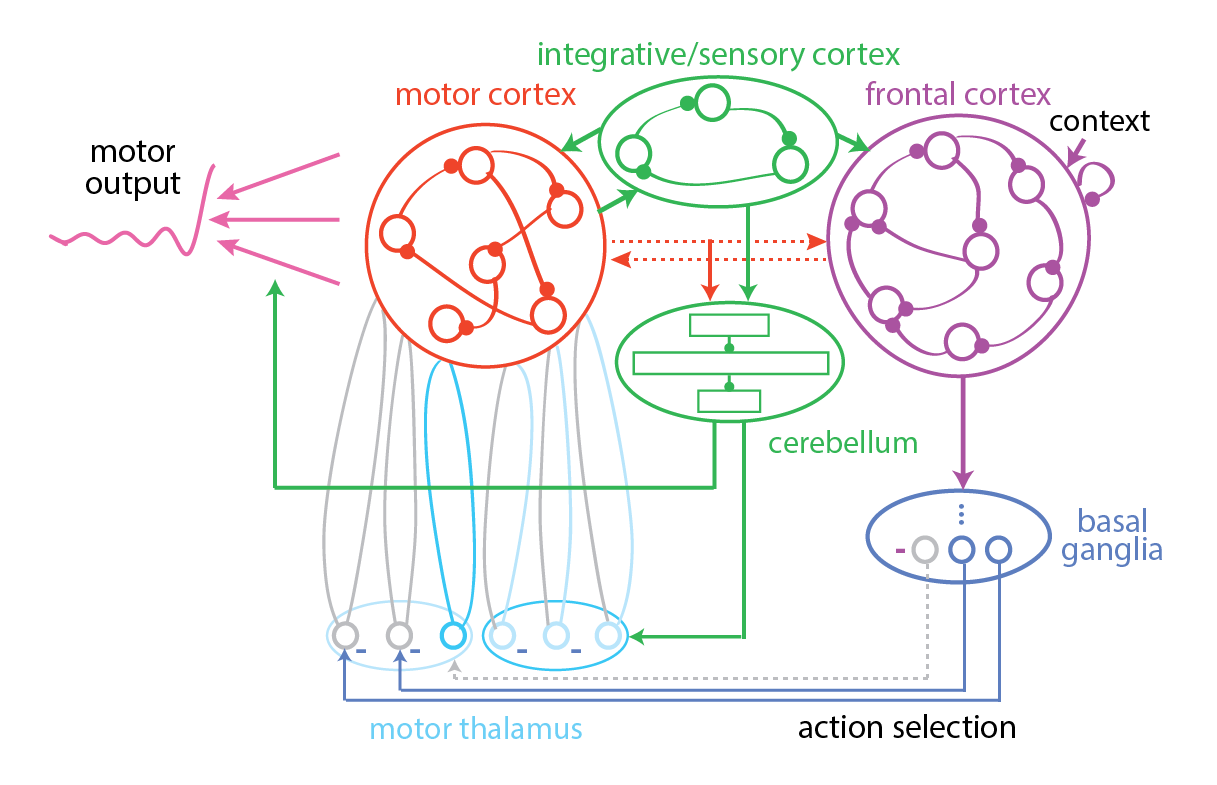
For instance, if the cerebellum — the bottom green region in the highly schematized diagram above — is impaired, this leads to specific motor deficits, such as unstable and uncoordinated movements, and issues with maintaining stable posture and balance.
In contrast, if the primary motor cortex — the red area in the above diagram — is lesioned, this mostly results in difficulty voluntarily contracting and/or relaxing some muscles.
Understanding why and how this specialization of different parts of the brain occurs has proven challenging as these different regions dynamically interact.
To overcome this difficulty, we leverage recent advances in machine learning to build structured neural network models that implement hypotheses about how different parts of the brain distinctly contribute to shaping behavior from sensory input. This allows us to verify whether our hypotheses are sufficient to explain experimental observations about these brain regions during behavior. Neural network models can also provide insights into how our brains flexibly learn and adapt to new circumstances. In addition, these models can be probed more fully than the actual brain. This makes such models invaluable tools for dissecting how different brain regions can collaborate to perform computations. Finally, these models can guide new experiments that aim at more precisely probing their underlying hypotheses.
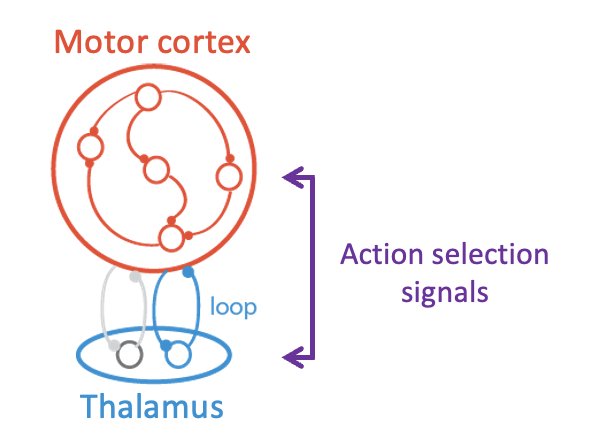
For instance, we have focused on the interactions between the motor thalamus (a small brain region whose neurons cannot directly excite one another) and the motor cortex (a larger brain region where neurons can excite one another through recurrent connections). By analyzing and simulating models of this circuit, we found that this neural network architecture is well-suited to interface efficiently with action selection signals during hierarchical action sequencing. Specifically, it facilitates (i) learning many new movements without forgetting previously learned ones; and (ii) forming sequences by stringing movements in arbitrary orders, which can generalize beyond initially learned movement orderings.

In another ongoing project, we ask why two brain systems — the primary motor cortex (in red) and the cerebellum with associated integrative sensorimotor cortices (in green) — are both shaping motor commands. We argue that experimental results are broadly consistent with a model where the former system learns to produce a motor command based on a form of goal-driven reinforcement learning, while the latter system learns to produce a motor command based on a form of predictive self-supervised learning. We are building such a model by leveraging advanced machine learning techniques. This allows us to study how this dual controller facilitates quickly adaptive motor control.